Home Page


Powered by wonder, fueled by possibility, and ready to inspire.
Get started by exploring our Areas of Study

Next Steps to Enroll
From deposit to housing, view the first five steps for accepted first-year students.

Visit Us on Campus
Tours and information sessions are offered six days a week or you can explore other ways to experience RIT.





Meet the Dean

Engineers are creative problem solvers who can have a profound impact on the world. In addition to providing an outstanding technical foundation, the Kate Gleason College of Engineering encourages students to understand the many ways in which their work affects society. Because we believe that students learn by doing, we provide them an abundance of opportunities to design, build, and innovate both inside and outside the classroom.
Faces of RIT
-
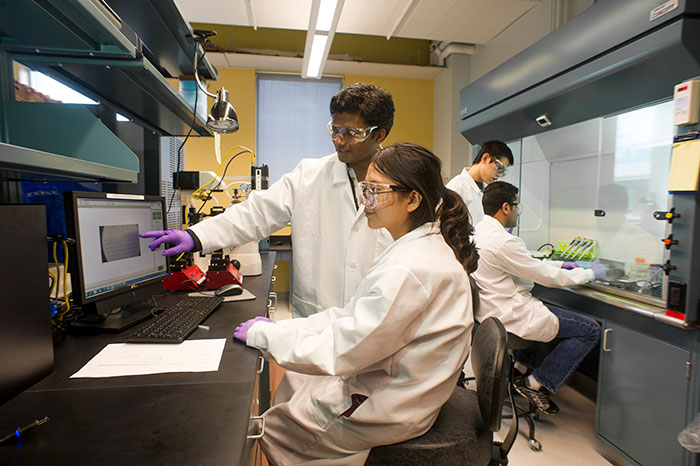
![Poornima Padmanabhan sitting with a student, showing them a model of a molecule.]()
Engineering Better Solutions
Poornima PadmanabhanAssistant ProfessorProfessor Padmanabhan’s students engage in hands-on research experiences that help build a better future through the creation of advanced complex materials that can solve problems in solar energy, health care, agriculture, and more.
-
![Michael Oshetski using microscope in a lab.]()
Take the Leap
Michael Oshetski '03CEO, Micatu Inc.Focused on making the utility grid more efficient and sustainable, Oshetski, an RIT alum, has a passion for entrepreneurship. Turning a start-up into reality led him to sharing a key piece of advice: Just go for it.
-
![Ashley Kosak operating machinery.]()
Stepping Up
Ashley KosakMechanical EngineeringIt might be just a stool, but it represents more than reaching equipment in the Machine Shop. It’s a symbol of the heightened awareness and inclusivity of women in engineering at RIT. After graduation, Kosak wants to influence change by helping women pursue careers in engineering.
-
![Humza Syed.]()
The AI Gateway
Humza SyedComputer EngineeringSyed is pushing the world forward by developing algorithms that apply artificial intelligence to make everyday tasks easy and more efficient.



Latest News
-
April 22, 2024
![a colorful background is set behind the text Futurists Symposium.]()
RIT alumni and faculty innovators to speak at Futurists Symposium on April 26
A highlight of this year’s Imagine RIT: Creativity and Innovation Festival takes place one day before thousands of visitors descend on campus. The annual Futurists Symposium, featuring a unique collection of the university’s alumni and faculty innovators, will be held at 4 p.m. on Friday, April 26, in the Wegmans Theater, MAGIC Spell Studios.
-
April 18, 2024
![a headshot of Alireza Vahid appears on the right with his name, title, and department to the left.]()
Engineering professor becomes part of SMART Hub to improve wireless spectrum accessibility
The wireless spectrum has become very crowded real estate, and work is underway through a new technology research center to improve spectrum access, co-existence, and security.
-
April 17, 2024
![a hand in a blue glove is holding a test tube containing large amounts of microplastics.]()
New microplastics research hub aims to unravel health impact in changing climate
RIT is spearheading a transformative $7.3 million research hub in collaboration with the University of Rochester. The center will study the lifecycle of microplastics, including its origin as plastic waste, distribution, and movement in the Great Lakes freshwater ecosystem.
-
April 10, 2024
![a student is shown in an orange snowsuit riding a snowmobile through snow.]()
Student team wins first SAE clean snowmobile competition
RIT’s Clean Snowmobile team took first place at the recent SAE Clean Snowmobile Challenge. It was the first time since the team began competing more than 10 years ago that the determined group dashed through the snowy terrain of Michigan to take top honors among 13 teams competing in the annual tournament in March.