
Novel BlueROV2
An enhanced autonomous underwater drone offers a cost-effective and sustainable solution for monitoring and conserving coral reefs
Team Members:
- Charbel Mezawi
- Mohammad Hadi Elabed
- Ahmed Jay Calso
- Maksim Rashchupkin
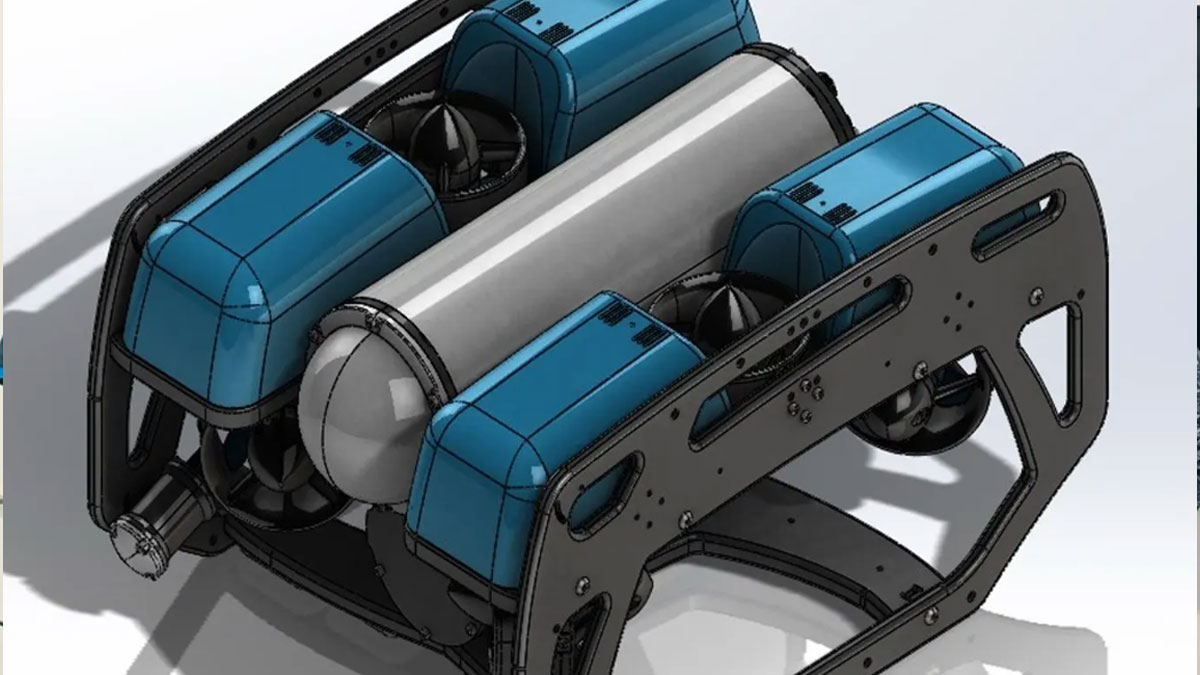
Coral reefs are special and unique organisms that face threats from the climate and the environment of humans and their impact. The BlueROV2, which is a vehicle controlled remotely used to monitor coral reefs, faces issues such as cost and usage of human facilities. This project aims to improve BlueROV2 to have an underwater drone with navigation, data collection, and evaluation systems. The drone will be fitted with other improved sensors and artificial intelligent software to help reduce man's role and allow for the ample surveying of coral reef structures without interference. This has brought with it some areas of concern such as cost, scalability, and maintenance of the system. The project also includes privacy threats and environmental vulnerabilities, for example, safeguarding the control system from cyber-attacks and decreasing the negative impact on marine life through an improved obstacle detection and sound control system. The anticipated results would be an intact and capable self-sustaining drone capable of maneuvering in the detected areas, foraging haphazard data in the environment for an elongated time. This innovation intends to create a versatile, cost-effective tool for marine research and conservation and make a huge contribution to false corals as well as underwater robots in general.