Hyperspectral video imaging and mapping of littoral conditions
Principal Investigator(s)
Charles Bachmann
Research Team Members
Gregory Badura, Rehman Eon, Christopher Lapszynski
Project Description
The centerpiece of this project is a state-of-the-art integrated mast-mounted hyperspectral imaging system developed by Dr. Bachmann, his students, and RIT staff. The system includes the Headwall visible and near-infrared (VNIR) E-Series micro-Hyperspec High-Efficiency (micro-HE) imager, a General Dynamics maritime-rated high-speed pan-tilt unit, and an onboard Vectornav GPS-IMU system for pointing, georeferencing, and precision timestamps. At maximum operating rates, the system can produce a low-rate hyperspectral video imagery time series at about 1.5 Hz. Details of the system and purpose are further described in a recent journal article that was featured on the cover of the Journal of Imaging (see below).
Project Status:
Using both the hyperspectral mast-mounted system and the Goniometer of the Rochester Institute of Technology-Two (GRIT-T), the team has developed and tested the hyperspectral video imaging system described above as well as retrieval algorithms based on improved radiative transfer models in both laboratory and field settings. Our retrieval algorithms, inversions of radiative transfer models that we have improved, have emphasized retrieval of sediment geophysical parameters. One of our recent publications extends a model that we originally validated in the laboratory using our GRIT-T hyperspectral goniometer system to realistic remote sensing in field settings using multi-view hyperspectral imagery as input to the retrieval algorithm. Examples were developed using both airborne hyperspectral imagery from the NASA G-LiHT sensor suite as well as multi-spectral satellite imagery from GOES-R. Some of our more recently published laboratory analyses have focused on a potentially confounding factor in retrievals of geophysical parameters, namely surface roughness as well as a method to quantify the degree of surface roughness from a direct measure of the variability of spectral response with angle.
Figures and Images
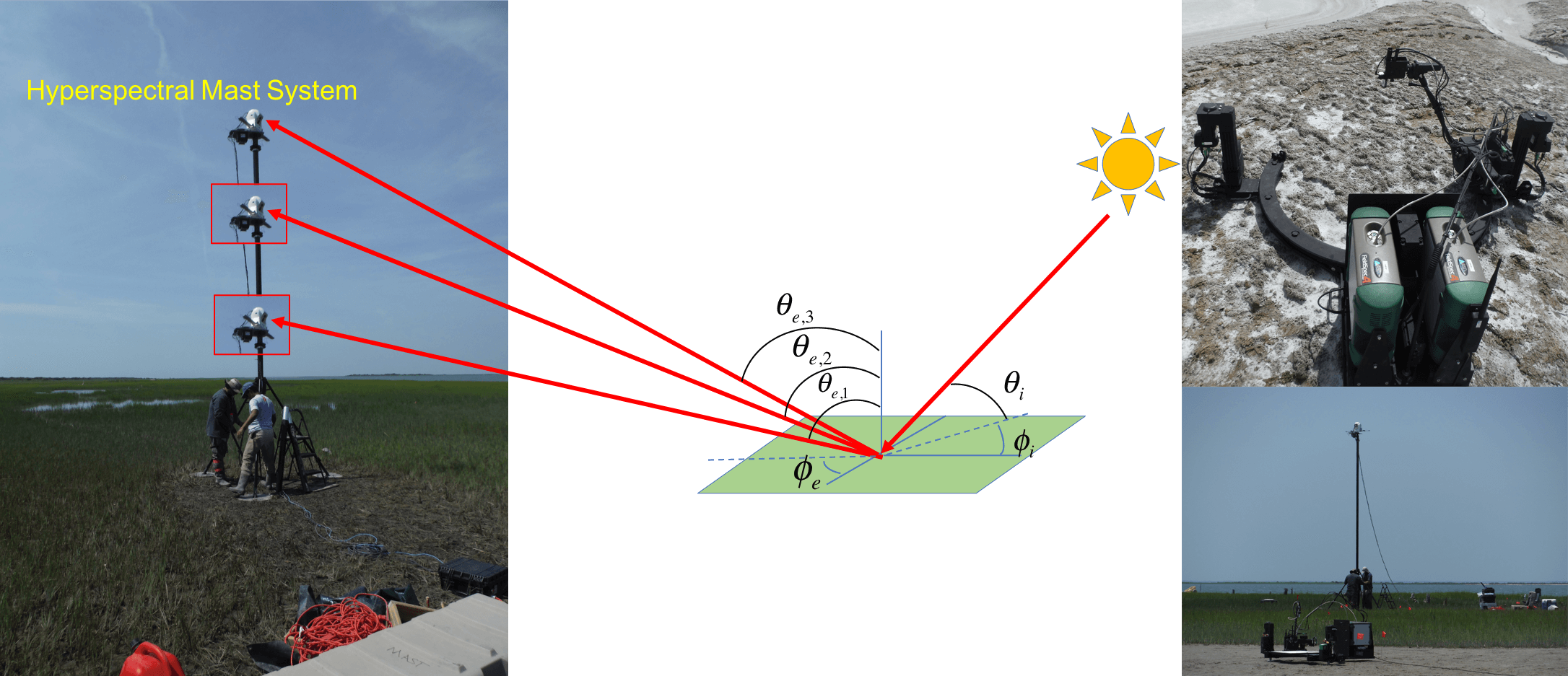
Both the hyperspectral imaging mast-mounted system (left) and the hyperspectral goniometer system, GRIT-T, sample the bi-directional reflectance distribution function (BRDF) of the surface. GRIT-T is a fully programmable robotic system capable of measuring hyperspectral BRDF over the entire viewing hemisphere between 0-70 degrees in zenith and 0-360 degrees in azimuth in both field and laboratory settings. The hyperspectral mast-mounted system can obtain low video rates, producing hyperspectral image cubes at up to 1.5 Hz. The telescopic mast, on which it is normally deployed, al-
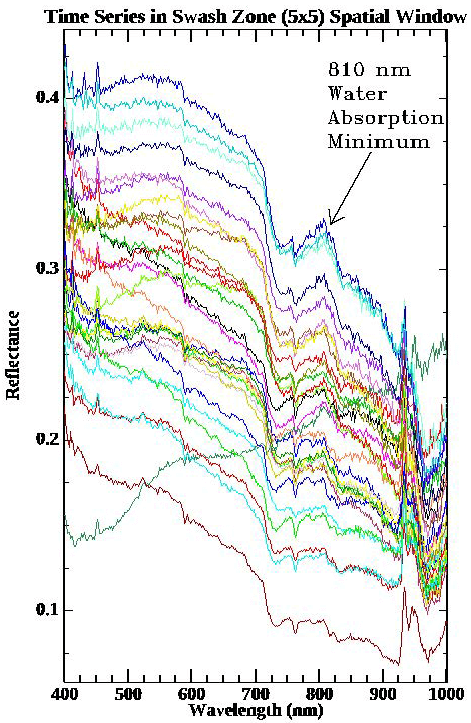
Hyperspectral signature of a swash zone point over 30 second interval acquired every 2/3 s from image sequence shown

Mast-mounted hyperspectral imaging system operating from a telescopic mast and capable of low-rate video hyperspectral imaging sequences.