Longwave Thermal Infrared Atmospheric Correction Using In Situ Scene Elements: The Multiple Altitude Technique Revisited For Small Unmanned Aircraft Systems (sUAS)
Principal Investigator(s)
Research Team Members
Bobby Mancini (BS)
Karla van Aardt (BS)
Danny Klosinski (BS)
Ryan McDonald (BS)
Parker Mei (BS)
Timothy Bauch
Nina Raqueno
Rehman Eon
Project Description
This work was selected as the Keynote Paper at the 2025 SPIE DCS Symposium's conference on Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping X.
Quantitative remote sensing using thermal infrared imaging from small unmanned aircraft systems (sUAS) often requires calibration reference targets to correct for atmospheric attenuation. These targets, such as controlled-temperature water baths, are complex to set up, maintain, and monitor, making their use impractical in many field applications. One possible solution is to neglect atmospheric effects, given that most operations occur below 400 feet in the United States, however, the effectiveness of such an approach depends on the task’s required noise-equivalent delta temperature (NEΔT). This study revisits the multiple-altitude calibration technique first proposed by Schott and Gallagher (1976) and applies it to sUAS operations. We demonstrate the technique’s viability using both modeled atmospheric propagation of sensor-reaching radiance with MODTRAN 6 and experimental data from a microbolometer-based thermal infrared camera flown on a multi-modal imaging payload. The experimental results showed average absolute errors of 3.69 and 2.50 [K] at aircraft altitudes of 250 and 120 [m], respectively, when atmospheric effects were neglected. Correcting the sensor reaching radiance for atmospheric transmission and upwelling path radiance, derived using the proposed methodology, produced average absolute errors of 1.29 and 1.27 [K], respectively, at these same altitudes.
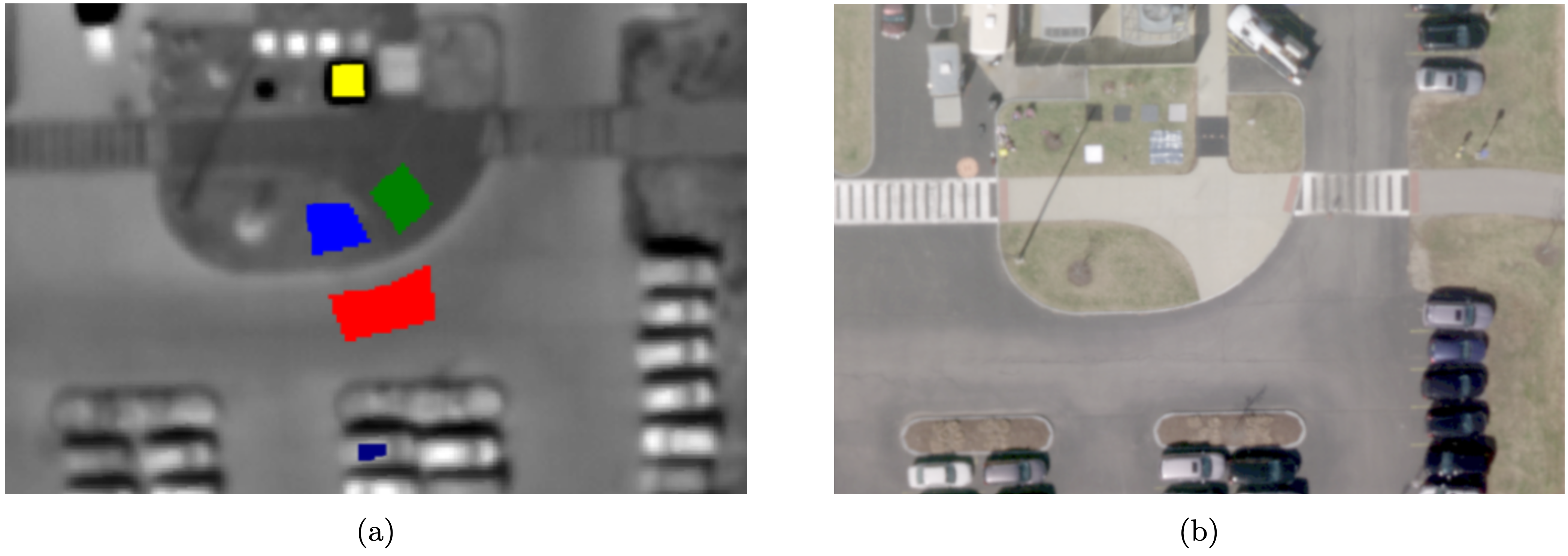
Figure 1: Regions of interest (ROI) depicting the aluminum foil reflective radiant barrier (yellow), concrete (green), grass (blue), asphalt (red), and an automobile (navy) used to develop the atmospheric radiance profiles (a). Micasense RedEdge-M (RGB) image provided for visual context (b).
![Average integrated sensor reaching radiance for asphalt, concrete, grass, foil, and the top of an automobile recorded at altitudes between ground level and 250 [m]. The curves represent manually drawn lines that were fit to the data by visual inspection. The average integrated radiance for ground level were extrapolated from these fit lines. The horizontal gray dotted lines indicate altitudes where values were used for calculation of transmission and upwelling radiance.](/dirs/sites/rit.edu.dirs/files/inline-images/Figure2_13.png)
Figure 2: Average integrated sensor reaching radiance for asphalt, concrete, grass, foil, and the top of an automobile recorded at altitudes between ground level and 250 [m]. The curves represent manually drawn lines that were fit to the data by visual inspection. The average integrated radiance for ground level were extrapolated from these fit lines. The horizontal gray dotted lines indicate altitudes where values were used for calculation of transmission and upwelling radiance.
![Interpolated average integrated at altitude radiances plotted against the corresponding interpolated average integrated ground leaving radiance for each calibration target. 17a shows the radiances plotted at 120 [m] AGL while 17b radiances plotted at 250 [m] AGL.](/dirs/sites/rit.edu.dirs/files/inline-images/Figure3_4.png)
Figure 3: Interpolated average integrated at altitude radiances plotted against the corresponding interpolated average integrated ground leaving radiance for each calibration target. 17a shows the radiances plotted at 120 [m] AGL while 17b radiances plotted at 250 [m] AGL.
References
[1] Salvaggio, C., Klosinski, D. P., Mancini, R. A., McDonald, R. B., Mei, P. M., van Aardt, K. S., Eon, R. S., Bauch, T. D., and Raque˜no, N. G. Longwave thermal infrared atmospheric correction using in situ scene elements: the multiple altitude technique revisited for small unmanned aircraft systems (suas). In Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping X (2025), vol. 13475, SPIE, pp. 10–36.