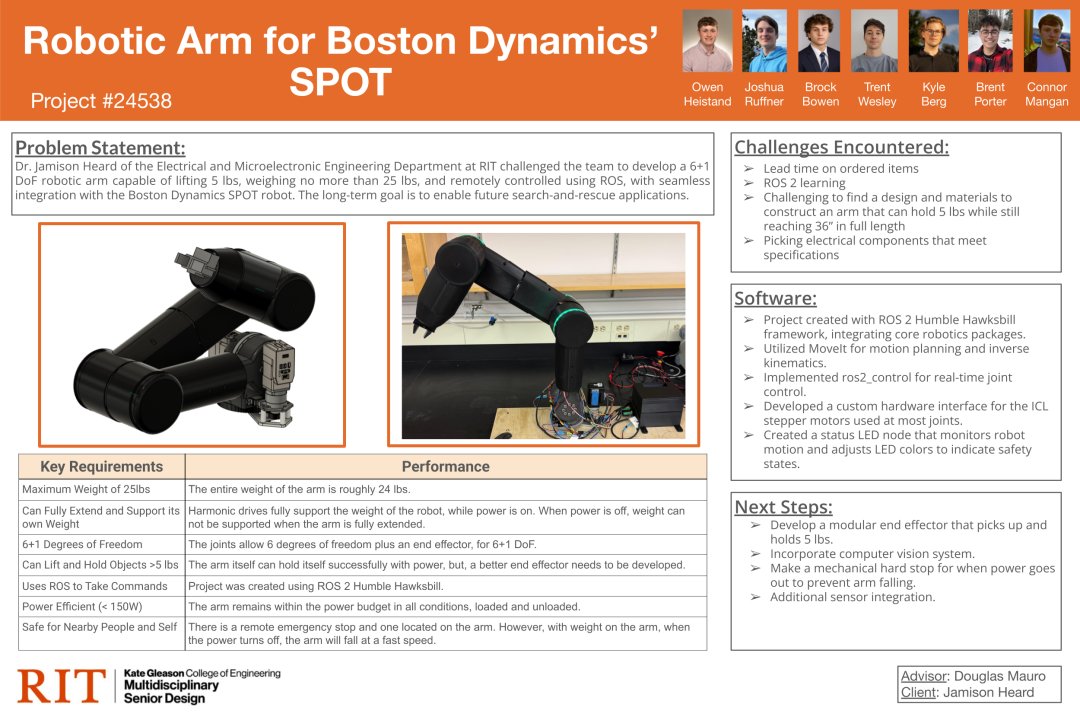
Robot Manipulator for Boston Dynamics SPOT
We were tasked with designing and constructing a six degree-of-freedom (6-DoF) robotic arm that meets the mechanical, electrical, and operational requirements for integration with a Boston Dynamics SPOT robot platform. Our client, Dr. Jamison Heard, a professor of electrical engineering and robotics, specified that the arm must be capable of reliably lifting and holding a minimum payload of five pounds. In addition to meeting these functional requirements, our final design emphasizes a sleek yet robust mechanical structure, delivering smooth, precise motion when controlled through ROS 2 and MoveIt.

Topics
Exhibitor
Brent Porter
Brock Bowen
Connor Mangan
Douglas Mauro
Trent Wesley
Owen Heistand
Joshua Ruffner
Kyle Berg
Advisor(s)
Douglas Mauro
Organization
MSD project for spring/fall semesters of 2025.
Thank you to all of our sponsors!