Home Page
Join us for Fall 2026
There's still time to apply. For some programs, applications will be reviewed on a rolling, space-available basis.
Join Us for Accepted Student Open House
Visit campus on April 11 to meet faculty, tour campus, and ask your questions.




Meet the Dean

Engineers are creative problem solvers who can have a profound impact on the world. In addition to providing an outstanding technical foundation, the Kate Gleason College of Engineering encourages students to understand the many ways in which their work affects society. Because we believe that students learn by doing, we provide them an abundance of opportunities to design, build, and innovate both inside and outside the classroom.
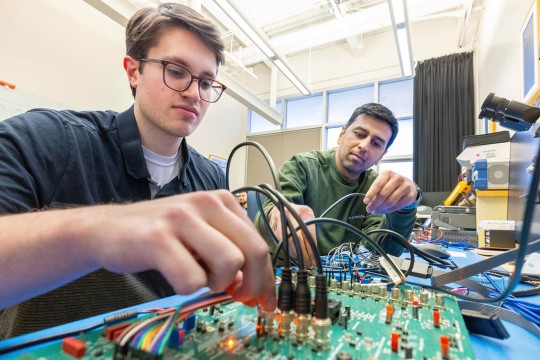
Faces of RIT
-
The AI Gateway
Humza SyedComputer EngineeringSyed is pushing the world forward by developing algorithms that apply artificial intelligence to make everyday tasks easy and more efficient.
-

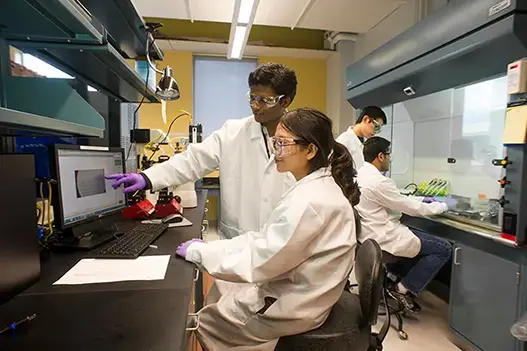
Engineering Better Solutions
Poornima PadmanabhanAssistant ProfessorProfessor Padmanabhan’s students engage in hands-on research experiences that help build a better future through the creation of advanced complex materials that can solve problems in solar energy, health care, agriculture, and more.
-

Take the Leap
Michael Oshetski '03CEO, Micatu Inc.Focused on making the utility grid more efficient and sustainable, Oshetski, an RIT alum, has a passion for entrepreneurship. Turning a start-up into reality led him to sharing a key piece of advice: Just go for it.
-

Stepping Up
Ashley KosakMechanical EngineeringIt might be just a stool, but it represents more than reaching equipment in the Machine Shop. It’s a symbol of the heightened awareness and inclusivity of women in engineering at RIT. After graduation, Kosak wants to influence change by helping women pursue careers in engineering.
Latest News
-
April 7, 2026

RIT’s graduate programs ranked among the best by ‘U.S. News & World Report’
Seventeen graduate degree programs at Rochester Institute of Technology and the graduate schools in business and engineering are among the best in the nation, according to U.S. News & World Report’s annual rankings.
-
April 2, 2026

Teaching and scholarship awards recognize top educators
Recognizing faculty and staff who excel at the university’s experiential, interdisciplinary, and collective approach to education makes the Celebration of Teaching and Scholarship a highlight of the academic year.
-
April 1, 2026

Successful space mission shows promise of RIT-led space energy solution
The number of satellites launched into space reached an all-time high in 2025, and that number is expected to increase exponentially within the next decade.
-
March 30, 2026
RIT researchers create adaptive computer chip design that saves power in everyday electronic devices
Researchers at RIT have developed a new computer chip design approach that allows electronic systems to automatically adapt to real-world conditions, improving how devices manage power in everyday use.
