Visual and Tactile Perception in Inspection of Machined Surfaces
RIT Ph.D. student Yan-Ting Chen, supervised by Dr. Rui Liu, has conducted a study that highlights the effectiveness of visual and tactile comparisons for production evaluation and quality control in the machining industry.
RIT PhD student Yan-Ting Chen, supervised by Dr. Rui Liu, has conducted a study that highlights the effectiveness of visual and tactile comparisons for production evaluation and quality control in the machining industry.
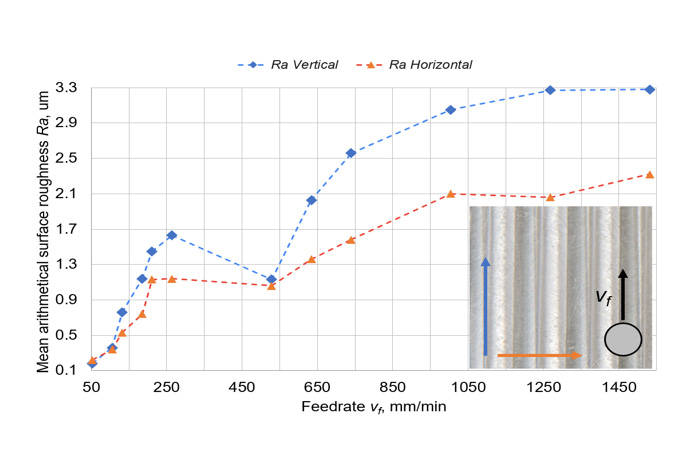
Although less accurate than advanced measurement techniques, relying on an inspector's visual and tactile senses allows for a quick verification of a part's surface roughness following the technical standards specified in the drawings. This study uses real industrial scenarios to evaluate an on-site surface roughness assessment technique. Participants engaged in sets of two-alternative forced-choice trials, identifying the rougher sample from pairs of milled surfaces. The inspection process used five modes: 1) visual inspection, 2) visual inspection combined with tactile assessment using vertical and 3) horizontal sliding touch, and 4) tactile inspection using vertical and 5) horizontal sliding touch without visual input. The results show that most participants successfully identified the rougher sample in all sensory conditions, although accuracy varied with stimulus intensity and inspection mode. Horizontal gliding touch produced the highest accuracy, while the combined use of visual inspection and horizontal gliding touch produced the most consistent performance.
More Featured Profiles and Work
Mehran Mansouri
Cory Merkel

Alaleh Vaghef-Koodehi, Blanca H. Lapizco-Encinas