Model Free Sliding Mode Control for Unmanned Aerial Vehicles (UAVs)
The development process of aerial robotics spans conceptual design and modeling using CAD tools, rapid prototyping through additive manufacturing (3D printing) in the early stages, and the selection and integration of onboard hardware.
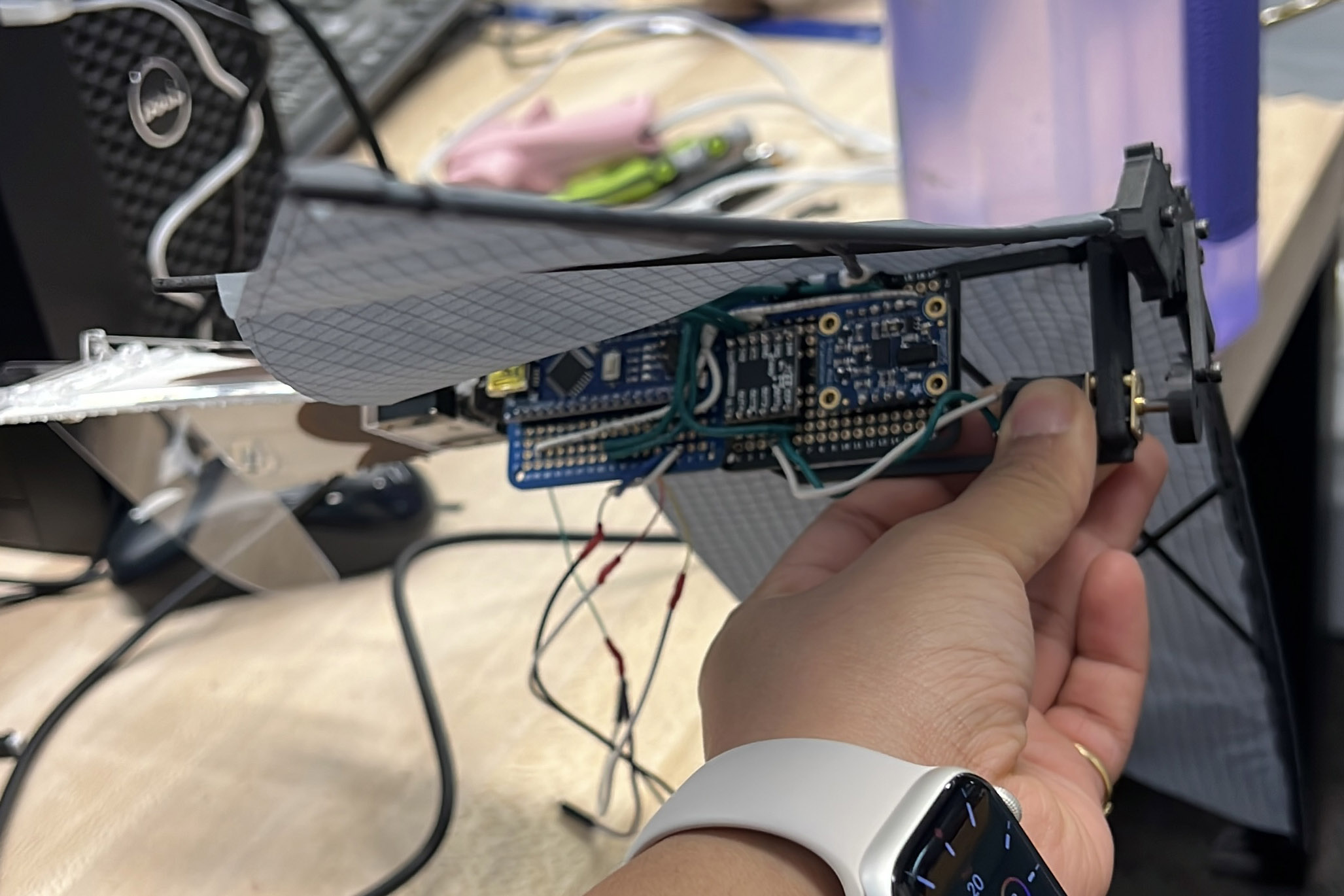
I’m in my final year of Mechanical and Industrial Engineering Ph.D. and work at the Unmanned Aircraft System and Guidance, Navigation and Control (UAS & GNC) lab headed by Dr. Agamemnon Crassidis. Our lab has worked on a range of aerial robotics platforms, from earlier flapping-wing vehicles (ornithopter) to current eVTOL systems. The development process spans conceptual design and modeling using CAD tools such as SolidWorks and Onshape, rapid prototyping through additive manufacturing (3D printing) in the early stages, and the selection and integration of onboard hardware including microcontrollers, sensors, and communication modules. These elements are combined through mechanical and electronic integration to realize complete flight systems.
On the control and simulation side, a mathematical model of the aircraft is first developed based on the kinmeatics and dynamics. This model describes how the vehicle moves and responds to disturbances in the environment, allowing us to predict its behavior and test control strategies in a computer simulation (Matlab/Simulink) before flying it in the real world. Creating an accurate model is challenging because aircraft systems are highly nonlinear in nature and can behave in complex and unpredictable ways. Even with careful design, differences between the model and the real system can occur due to unknown effects, changing conditions, or disturbances such as wind. These differences can reduce how well a control system performs and, in some cases, can cause instability. Addressing these challenges is an important part of our research. Our solution to these challenges is the development of a model free sliding control algorithm for highly nonlinear systems, which only requires the system measurements, its state and previous output.
This algorithm has been successfully implemented in many computer simulations and real-time systems. One example of its successful use is on the DJI Tello micro-UAV for autonomous flight. By using a model-free sliding mode control (SMC) approach, the system was able to reliably follow waypoints without needing an exact mathematical model of the drone. This makes the method well suited for systems where the behavior is uncertain or difficult to model accurately.
More Featured Profiles and Work
Jonathan Lawley

Joseph Vazquez ’24
